
BACK
TO TOP
03 May 2021
As part of ongoing digital transformation efforts, DSTA is collaborating with the SAF to trial autonomous vehicles (AV) within SAF facilities to realise their potential for peacetime logistics and transportation.

For a start, the Army and the RSAF are conducting trials on AVs to carry logistical supplies and personnel along pre-programmed routes in Kranji Camp 3 and Paya Lebar Air Base. The RSN is also partnering DSTA to develop and trial an autonomous load transporter that would facilitate the movement of spares within a naval base.
The DSTA team developed the concept of a modular dual-role AV and is working closely with the SAF to assess its adoption, as well as validate different operational use-cases through the trials.
The AV can take up to nine seated commuters, and is equipped with a suite of sensors for self-navigation and collision avoidance, as well as other safety features including autonomous emergency brakes and physical emergency-stop buttons within the shuttle cabin. For safety purposes, a safety operator will be on board the AV at all times during the trial period, and will be able to assume manual control of the vehicle at any time if necessary.

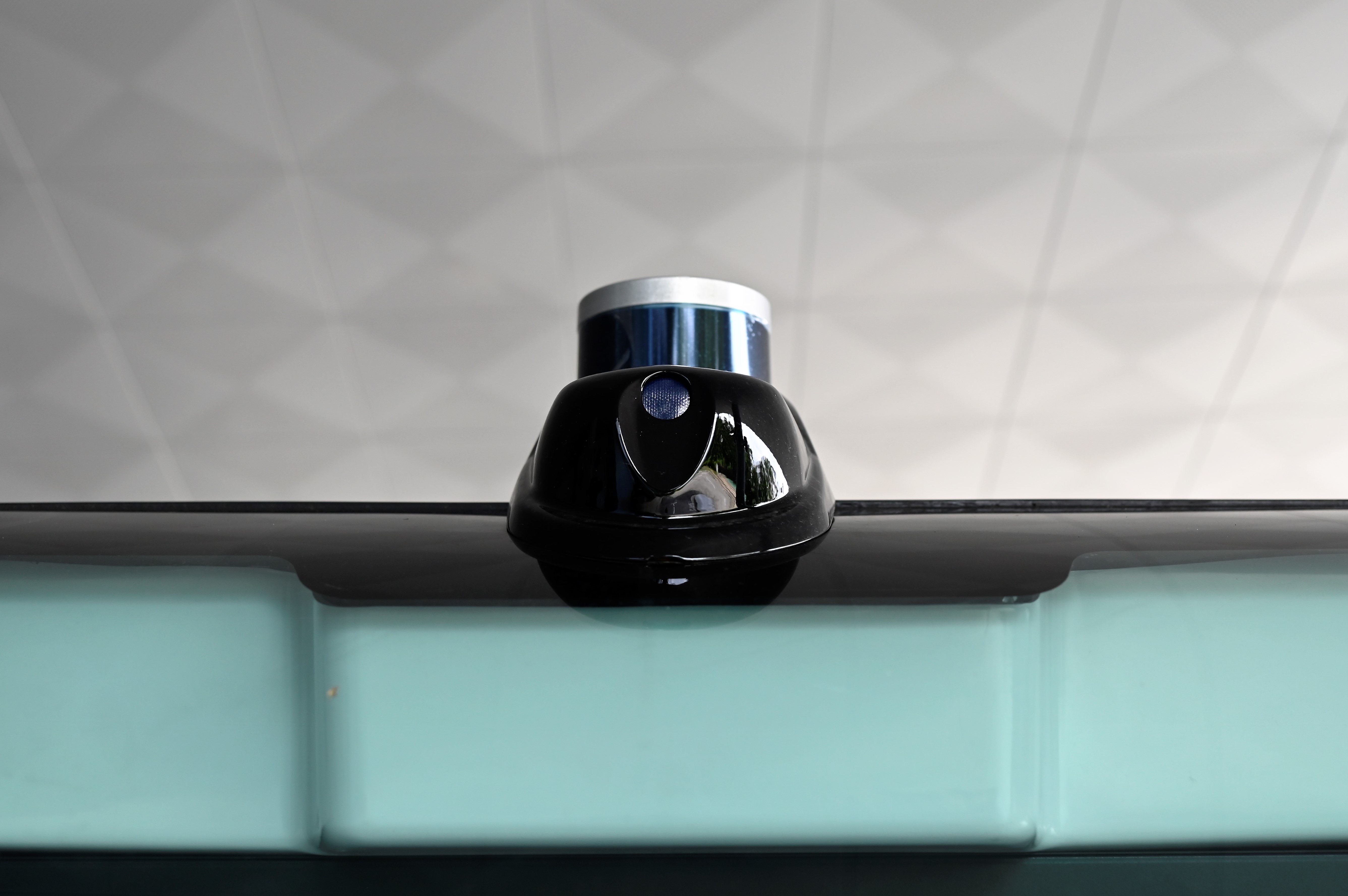
One of the key sensors that help the AV to 'see' its surroundings is the Light Detection and Ranging (LiDAR) sensor, which is located strategically around the vehicle. This provides the AV with a good all-round field-of-view coverage for the vehicle to sense its surroundings. The LiDAR sensor emits laser pulses at high frequency and measures the time taken for the laser pulses to return to the sensor so as to determine the distance of any nearby obstacles. This enables the AV to detect nearby structures to localise its position in real time, as well as detect any obstacle that might be in its path.
Another key sensor is the real-time kinematic navigation using Global Navigation Satellite System (RTK-GPS), which enhances the accuracy of the AV's positioning data. Together with the LiDAR, RTK-GPS and other complementary sensors, the AV is able to precisely locate its position with high accuracy, thereby allowing it to navigate safely within the designated lanes in a congested camp environment.
The team also integrated locking mechanisms in the AV's cabin, to facilitate the secure transportation of modular logistic payloads within the camp.


To further enhance user experience, the team is developing a mobile app that will allow camp personnel to call for on-demand ferry services remotely with designated stops. This will help reduce waiting times for camp personnel travelling to various locations within the camp, and enhance productivity of daily operations.
Looking ahead, the best practices garnered from these trials will be consolidated and shared across the Services to help drive the adoption of unmanned technology. One of the team members Senior Programme Manager (Land Systems) Collin Chng said: “We hope to further exploit unmanned technology to achieve greater efficiencies and manpower optimisation, while contributing to greener and more sustainable forms of transport for the SAF."

The team (from left, 2nd row) comprises Senior Programme Manager (Land Systems) Collin Chng, Head Capability Development (Unmanned Ground Vehicles) Dominic Li and Senior Engineer (Land Systems) Benjamin Eu, alongside their SAF counterparts.